滑动自动操作技术由软件和硬件两部分组成,软件部分主要接收三个输入数据,数据显示在一个人工输入的屏幕上, 来自顶驱的地面扭矩和立管压力 (作为一个反应扭矩的指示)。在摆动过程期间,系统不断地左右精细调整施加的地面扭矩,校正反应扭矩的变化。为了在摆动过程期间定位工具面,定向司钻可以通过向左或向右脉动地施加扭矩来改变工具面方向。硬件部分是一个自控系统,可安装在任何类型的顶驱中,这个地面控制系统与顶驱控制系统相连接,通过顺时针和逆时针交替摇动钻柱顶部,使钻柱上部始终处于切向运动。
自动扭矩控制系统与滑行者系统
自动扭矩控制系统调整地面扭矩量值,这个地面扭矩量值是需要传递给钻头的正常钻压值,无需提起钻柱离开井底校正工具面。在摇摆过程中,通过外加扭矩脉动(冲撞或冲震)工具面角度的校正很容易做到,利用顶驱进行左右扭矩摇摆,减小井眼纵向阻力,让钻杆从地面向下转动至一个位置点,该位置点的扭矩与井眼一侧的旋转摩擦力相对抗,使钻杆转动停止。为在旋转钻进模式下滑动钻进,司钻简单地开始一个自动的摇摆动作,通过运用扭矩向右、接着再向左这种动作将合适的钻压传递给钻头,通过摇摆深度的自动调整来控制钻压的传递,补偿反应扭矩变化。
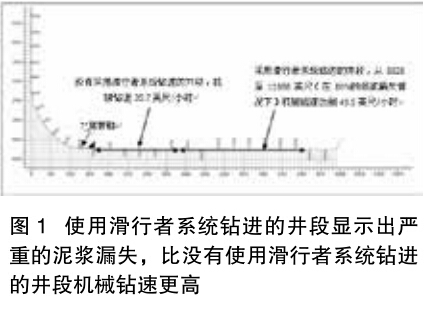
图 1 展示了 Khurais 油田一口典型井的定向轨迹,6 1/8〞的水平段从一个 7〞尾管鞋 5,889 英尺(1,794.97米) 处 钻 至 14,350 英 尺(4,373.88米),水平段钻进长度延伸了 8,460英尺(2,578.61 米),尾管鞋被设定在一个 85°的倾斜。该井段用导向马达钻进,从尾管鞋的位置到 8,828 英尺(2,690.77 米)的测量深度没有使用滑行者系统,当井钻至 7,000 英尺(2,133.6 米)时,遭遇了一个严重的循环漏层,泥浆反出量仅有正常量的20%。在这种情况下,由于常规滑动模式井眼净化很差,岩屑开始堆积在水平段的下侧,钻进过程中持续用水和凝胶除屑,但在 8,828 英尺(2,690.77米)的测量深度,由于严重的钻柱摩阻,使常规滑动钻进变得极为困难。石油公司决定安装新的滑行者系统,解决接下来的极度摩阻问题。使用滑行者系统从 8828 英尺钻进至 12,888 英尺(2,690.77 米 ~3,928.26 米),在仅有 20% 泥浆反出的情况下,水平段钻进超过 4,000 英尺(1,219.2 米),尽管井眼工况恶劣,滑动钻进仍然进行得很成功。
提高机械钻速 缩短钻井周期
滑行者系统还被用来钻分支井 B。在这口井中,7〞尾管以 85°的斜度下至 7,850 英尺(2,392.68 米),接着钻 6 1/8〞水平主井段到 9536 英尺(2,906.57),在这个位置进行常规滑动钻进达到一个可以接受的机械钻速则变的非常困难,决定安装滑行者控制系统,利用滑行者控制系统继续进行钻进,直到主井眼钻进的测量深度达到12,070 英尺(3,678.94 米)。一个没有滑行者系统协助钻进的井段,钻进中由于反应扭矩和导向马达失速问题使得工具面不稳定很难进行控制。
滑行者系统滑动钻进时的机械钻速与旋转钻进时机械钻速有着明显不同,两种钻进模式在相似的范围进行比较。不使用滑行者系统的滑动钻进机械钻速大约会是旋转钻进模式机械钻速的 30%,这一技术的另一个好处是有一个较高的滑动钻进机械钻速。从钻井跟踪的信息和定向司钻报出的参数报告来看,在没有使用滑行者系统时,钻井时间的分配情况是:滑动钻进时间为 60%,旋转钻进时间为 40%;而使用了滑行者系统时,比率则改变为:图 1 使用滑行者系统钻进的井段显示出严重的泥浆漏失,比没有使用滑行者系统钻进的井段机械钻速更高滑动钻进时间为 25%,旋转钻进时间为 75%;滑动钻进时间减少的比例主要是因为滑动模式期间使用了这项新技术,机械钻速得到了提高。
钻井队轮流采用和不采用滑行者系统钻 C 井的一个井段,在相同井眼条件下和使用相同井底钻具组合条件下比较这项新技术的应用效果。7〞尾管下在 6,200 英尺(1,889.76 米)的测量深度,倾斜角为 84°,在 6 1/8〞井段钻进至 7,737 英尺(2,358.24 米)后,司钻开始采用滑行者系统。当使用了滑行者系统时,平均提高的滑动钻进机械钻速约为 60%。在 D 井,使用滑行者系统钻进了整个水平段,从 6,200英尺(1,889.76 米)的测量深度钻至11,213 英尺(3,417.72 米)的测量深度。在 9,500 英尺(2,895.6 米)处,阻力达到 45,000 磅(20,411.66 千克或 20.4 吨),而采用滑行者系统摇摆钻柱,有效地克服了摩擦阻力,最大限度地减少了钻杆纵向弯曲(压弯或扣住或绊住)现象,有效地将钻压传递给了钻头。
新滑动钻进技术证明了通过顺时针和逆时针交替旋转钻柱,克服导向马达与摩擦力有关的问题是可能的,使上部钻柱处于切向运动。该技术可使钻压平滑地传递给钻头,从而消除马达的失速。在一些实例中,滑动钻进的机械钻速提高了 70%。滑行者系统确保了一个非常稳定的工具面方向,显示出在任何时候只要需要都具有很好的校正工具面角度的能力。而且该技术还能在滑动钻进期间提供一个纠正工具面方向的有效方法。滑行者系统的成功运用还需要对定向司钻进行培训,确保他们依照滑行者系统的设计所使用。自动扭矩控制系统采用摇摆方式,钻柱则表现出似乎在转动的现象,使滑动进程更为有效。采用常规导向马达钻进,自动滑动钻进系统能够真正实现日进尺和水平段长度两项指标的

 微信公众号
微信公众号
 微信视频号
微信视频号







 京公网安备11010502053156号
京公网安备11010502053156号