
Page 63 - 202208104
P. 63
Overview of New Technologies·New Technology 新技术 新技术纵览
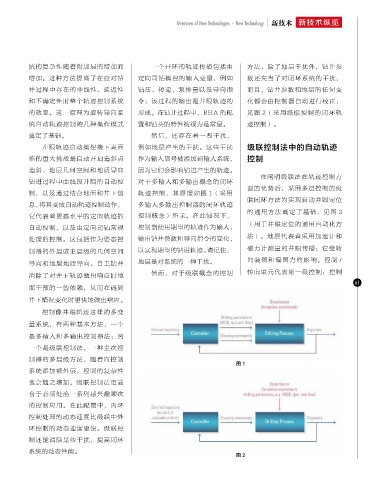
统的复杂性随着附加层的增加而 一个开环的轨迹传播包括由 方法,除了地层干扰外,钻井参
增加。这种方法提高了在应对钻 定向司钻操控的输入变量,例如 数还充当了对闭环系统的干扰,
井过程中存在的非线性、延迟性 钻压、转速、泵排量以及导向指 而且,钻井参数和地层的任何变
和不确定性时整个轨迹控制系统 令;该过程的输出是井眼轨迹的 化都会由控制器自动进行校正,
的效率。这一原理为旋转导向系 形成。在钻井过程中,BHA 的配 见图 2(采用级联控制的闭环轨
统自动轨迹控制的几种操作模式 置和钻头的特性被视为是常量。 迹控制)。
奠定了基础。 然后,还存在着一些干扰,
井眼轨迹自动操控接下来面 例如地层产生的干扰。这些干扰 级联控制法中的自动轨迹
临的重大挑战是自动开启造斜点 作为输入信号被添加到输入系统, 控制
造斜、地层几何空间和地质导向 因为它们会影响钻进产生的轨迹。
在阐明级联法在轨迹控制方
钻进过程中曲线段井眼的自动控 对于多输入和多输出概念的闭环
面的优势后,采用多层控制的级
制,以及通过结合地面和井下信 轨迹控制, 其原理如图 1(采用
联闭环方法为实现自动井眼定位
息,将其变成自动轨迹控制动作, 多输入多输出控制器的闭环轨迹
的通用方法奠定了基础,见图 3
它代表着更高水平的定向轨迹的 控制概念)所示。在此情况下,
(用于井眼定位的通用自动化方
自动控制,以及由定向司钻常规 控制器使用期望的轨迹作为输入,
处理的控制。这包括作为姿态控 输出钻井参数和导向指令的变化, 法)。地层代表着采用加速计和
制器的外层或主层级的几何空间 以实现期望的钻进轨迹。请记住, 磁力计测量的井眼传播;它受转
导向和地层地质导向。自主钻井 地层是对系统的一种干扰。 向装置和偏置 力的影响。控制 /
消除了对井下轨迹做出响应时地 然而,对于级联概念的控制 转向单元代表第一级控制;控制
61
面干预的一些依赖,从而在遇到
井下情况变化时更快地做出响应。
控制像井眼轨迹这样的多变
量系统,有两种基本方法,一个
是多输入和多输出控制器法;另
一个是级联控制法,一种主次控
制器的多层级方法,随着向控制
图 1
系统添加额外层,控制的复杂性
也会随之增加。级联控制法更适
合于必须处治一系列感兴趣频次
的控制应用。在此配置中,内环
控制处理的动态速度比级联中外
环控制的动态速度更快。级联控
制还能消除某些干扰,提高闭环
系统的动态性能。
图2